基于神經(jīng)網(wǎng)絡(luò)的自適應(yīng)滑模逆控制器設(shè)計(jì)

在導(dǎo)彈飛行控制中,由于參數(shù)變化劇烈, 和 無法準(zhǔn)確得到。RBF[6]神經(jīng)網(wǎng)絡(luò)對非線性系統(tǒng)具有唯一最佳逼近的特性。所以,構(gòu)造RBF神經(jīng)網(wǎng)絡(luò),使其輸出 和 來逼近 和 。RBF網(wǎng)絡(luò)模型如圖1所示: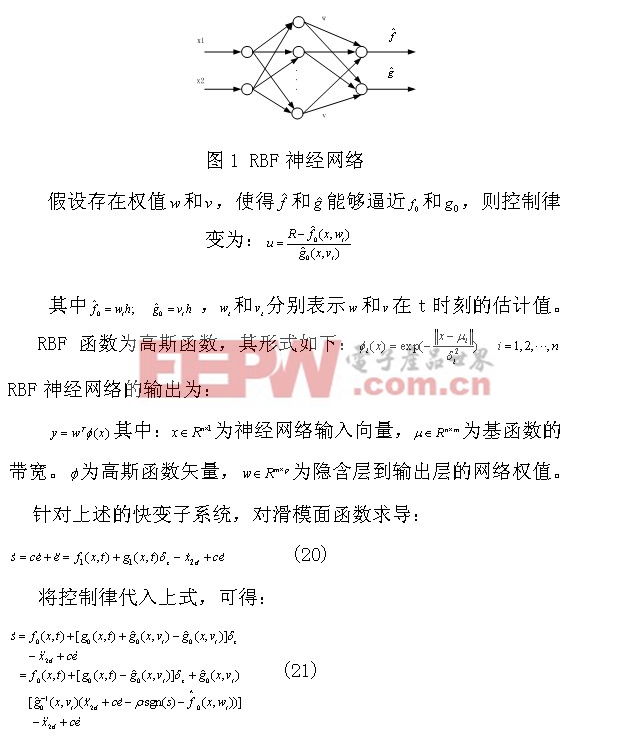
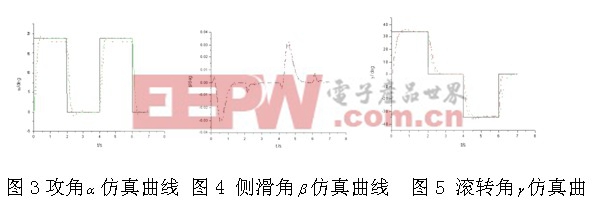
5、仿真結(jié)果分析
5、仿真結(jié)果分析
6、結(jié)論
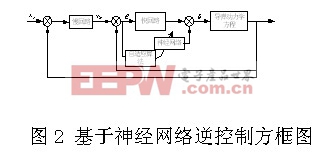
基于導(dǎo)彈非線性控制模型,應(yīng)用時(shí)標(biāo)分離動態(tài)逆方法設(shè)計(jì)了一種非線性導(dǎo)彈控制系統(tǒng)。該方法通過引入神經(jīng)網(wǎng)絡(luò),將動態(tài)逆方法與自適應(yīng)滑模控制相結(jié)合,有效的消除了建模誤差對整個(gè)系統(tǒng)的不利影響,增強(qiáng)了控制系統(tǒng)的魯棒性,適合于復(fù)雜的導(dǎo)彈控制系統(tǒng)設(shè)計(jì),具有良好的應(yīng)用前景。

關(guān)鍵詞:
控制器
設(shè)計(jì)
滑模
適應(yīng)
神經(jīng)網(wǎng)絡(luò)
基于
相關(guān)推薦












技術(shù)專區(qū)
- FPGA
- DSP
- MCU
- 示波器
- 步進(jìn)電機(jī)
- Zigbee
- LabVIEW
- Arduino
- RFID
- NFC
- STM32
- Protel
- GPS
- MSP430
- Multisim
- 濾波器
- CAN總線
- 開關(guān)電源
- 單片機(jī)
- PCB
- USB
- ARM
- CPLD
- 連接器
- MEMS
- CMOS
- MIPS
- EMC
- EDA
- ROM
- 陀螺儀
- VHDL
- 比較器
- Verilog
- 穩(wěn)壓電源
- RAM
- AVR
- 傳感器
- 可控硅
- IGBT
- 嵌入式開發(fā)
- 逆變器
- Quartus
- RS-232
- Cyclone
- 電位器
- 電機(jī)控制
- 藍(lán)牙
- PLC
- PWM
- 汽車電子
- 轉(zhuǎn)換器
- 電源管理
- 信號放大器
評論